常见的分布式并行策略
分布式:是指利用多个计算节点(也称工作节点,Worker)进行机器学习或者深度学习的算法和系统,旨在提高性能、并可扩展至更大规模的训练数据和更大的模型。
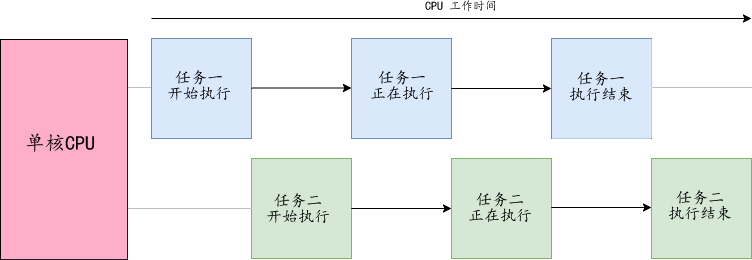
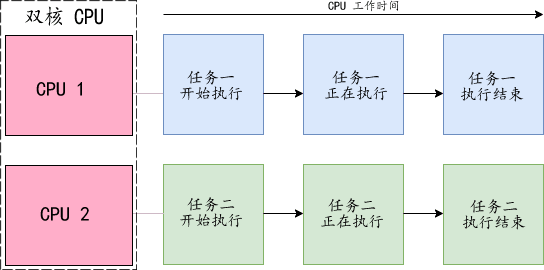
并行(parallel):是指两个或者多个事件在同一时刻发生,并行的反义词是串行;要区分并发(concurrent),它是指两个或多个事件在同一时间间隔发生
 |
 |
|---|---|
看了很多资料,一直也没搞清楚分布式并行到底是个啥,直到读完 OneFlow 的博客《常见的分布式并行策略》才感觉“我好像明白了”,哈哈哈哈或….
下面就来看看被大模型训练带火的「分布式并行策略」的介绍。
为什么分布式训练越来越流行¶
近年来,深度学习被广泛应用到各个领域,包括计算机视觉、语言理解、语音识别、广告推荐等。在这些不同的领域中,一个共同的特点就是模型规模越来越大,比如 GPT-3 模型的参数量达到1750亿。即使用1024张 80 GB 的 A100,那么完整训练 GPT-3 的时长都需要1个月。
模型规模的扩大,对硬件(算力、内存)的发展提出要求。然而,因为 内存墙 的存在,单一设备的算力及容量,受限于物理定律,持续提高芯片的集成越来越困难,难以跟上模型扩大的需求。
为了解决算力增速不足的问题,人们考虑用多节点集群进行分布式训练,以提升算力,分布式训练势在必行。
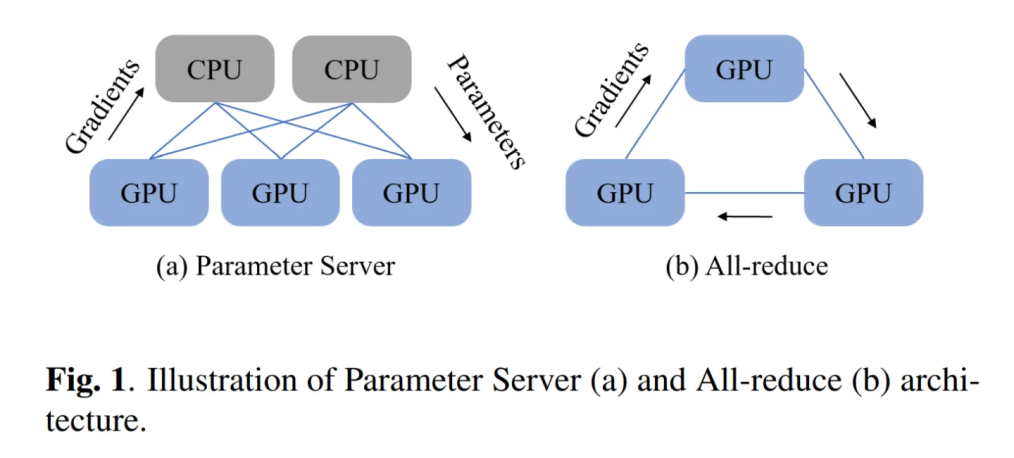
常见的分布式系统
常见的并行策略¶
简单的机器堆叠并不一定会带来算力的增长。因为神经网络的训练并不是单纯的“把原来一个设备做的事情,现在分给多个设备各自做”,它不仅需要多个设备进行计算,还涉及到设备之间的数据传输,只有协调好集群中的计算与通信,才能做高效的分布式训练。
我们将以矩阵乘法的例子,解释数据并行、模型并行的区别。
先了解以下逻辑上的矩阵乘法例子:
假设神经网络中某一层是做矩阵乘法,其中的输入 x 的形状为 4×5,模型参数 w 的形状为 5×8,那么,矩阵乘法输出形状为 4×8。示意图如下:
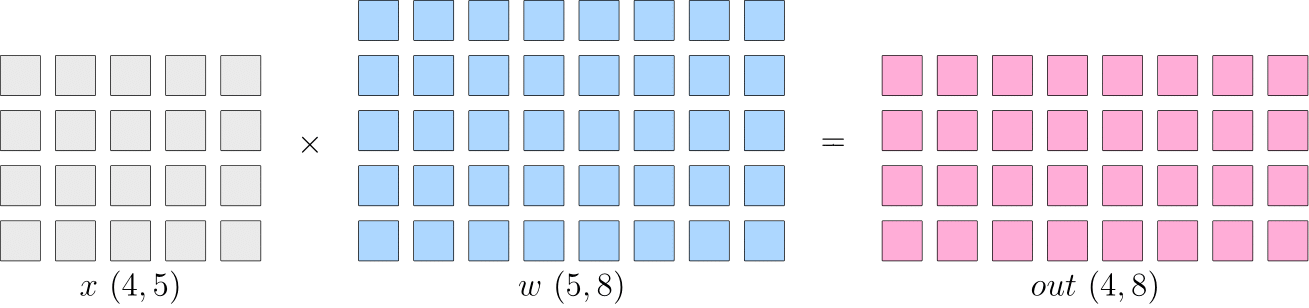
单机单卡的训练中,以上矩阵乘法,先计算得到 out,并将 out 传递给下一层,并最终计算得到 loss,然后在反向传播过程中,得到$\frac{\partial loss}{\partial w}$,用于更新 w。
分布式训练中,依据是切分 x 还是 w 的不同,分为“数据并行”和“模型并行”策略。接下来,我们介绍常见的并行策略。
数据并行¶
所谓的数据并行,就是将数据 x 进行切分,而每个设备上的模型 w 是完整的、一致的。如下图所示,x 被按照第0维度平均切分到2个设备上,两个设备上都有完整的 w。
这样,在两台设备上,分别得到的输出,都只是逻辑上输出的一半(形状为 2×8),将两个设备上的输出拼接到一起,才能得到逻辑上完整的输出。
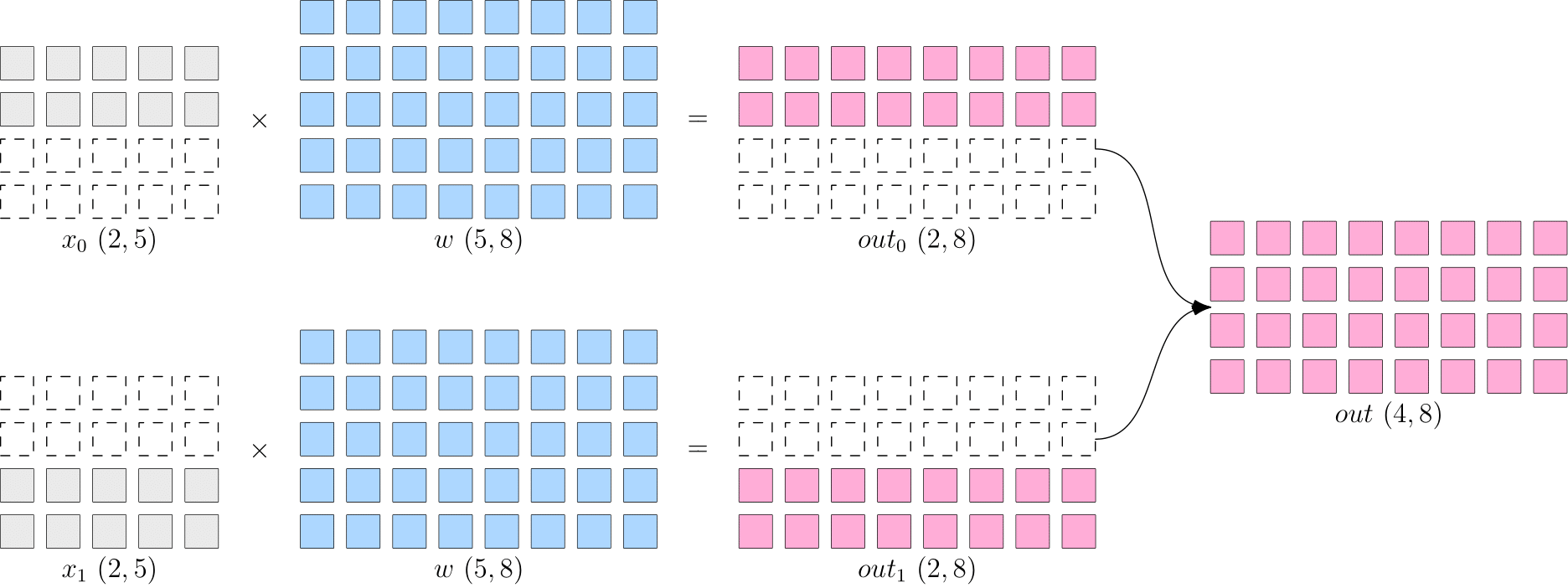
注意,因为数据被分发到了2个设备上,因此反向传播过程,各自设备上得到的 $\frac{\partial loss}{\partial w}$ 会不一样,如果直接使用各个设备上的梯度更新各自的模型,会造成2个设备上的 模型不一致,训练就失去了意义(到底用哪个模型好呢?)。
因此,数据并行策略下,在反向传播过程中,需要对各个设备上的梯度进行 AllReduce,以确保各个设备上的模型始终保持一致。
当数据集较大,模型较小时,由于反向过程中为同步梯度产生的通信代价较小,此时选择数据并行一般比较有优势,常见的视觉分类模型,如 ResNet50,比较适合采用数据并行。
模型并行¶
当神经网络非常巨大,数据并行同步梯度的代价就会很大,甚至网络可能巨大到无法存放到单一计算设备中,这时候,可以采用模型并行策略解决问题。
所谓的模型并行,就是每个设备上的数据是完整的、一致的,而模型 w 被切分到了各个设备上,每个设备只拥有模型的一部分,所有计算设备上的模型拼在一起,才是完整的模型。
如下图所示,w 被按照第1维度平均切分到2个设备上,两个设备上都有完整的 x。两个设备上的输出也需要通过拼接才能得到逻辑上的输出。
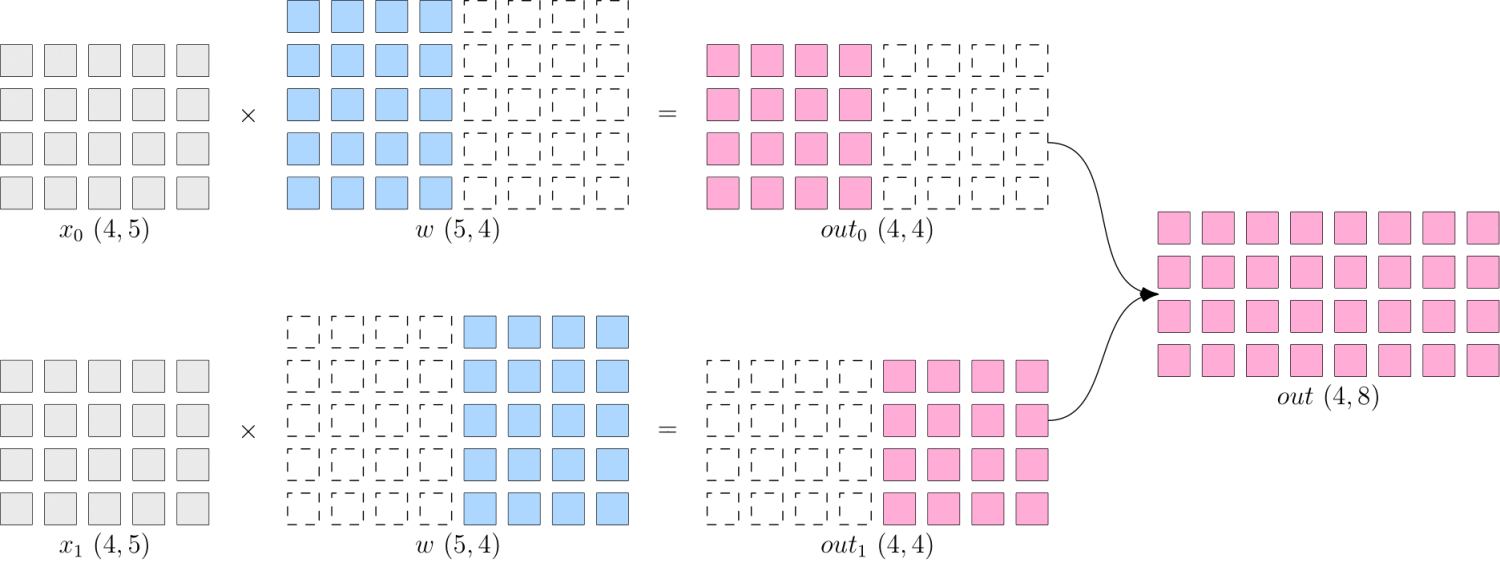
模型并行的好处是,省去了多个设备之间的梯度 AllReduce;但是,由于每个设备都需要完整的数据输入,因此,数据会在多个设备之间进行广播,产生通信代价。比如,上图中的最终得到的 out (4×8) ,如果它作为下一层网络的输入,那么它就需要被广播发送到两个设备上。
语言模型,如 BERT,常采用模型并行。
流水并行¶
当神经网络过于巨大,无法在一个设备上存放时,除了上述的模型并行的策略外,还可以选择流水并行。 流水并行指将网络切为多个阶段,并分发到不同的计算设备上,各个计算设备之间以“接力”的方式完成训练。
如下图,展示了一个逻辑上的4层网络(T1 至 T4)是如何做流水并行的。
4层网络被切分到2个计算设备上,其中 GPU0 上进行 T1 与 T2 的运算,GPU1 上进行 T3 与 T4 的计算。GPU0 上完成前两层的计算后,它的输出被当作 GPU1 的输入,继续进行后两层的计算。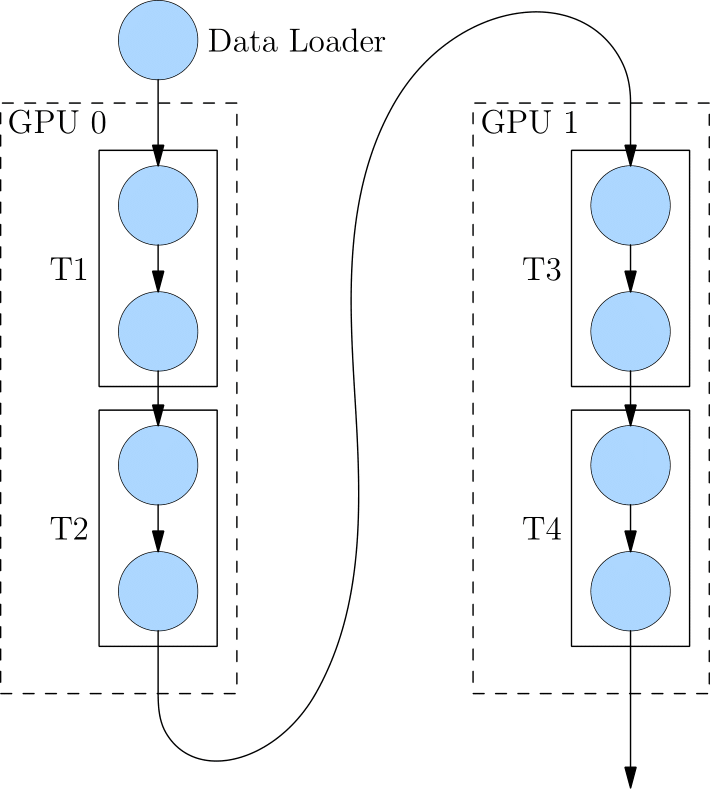
混合并行¶
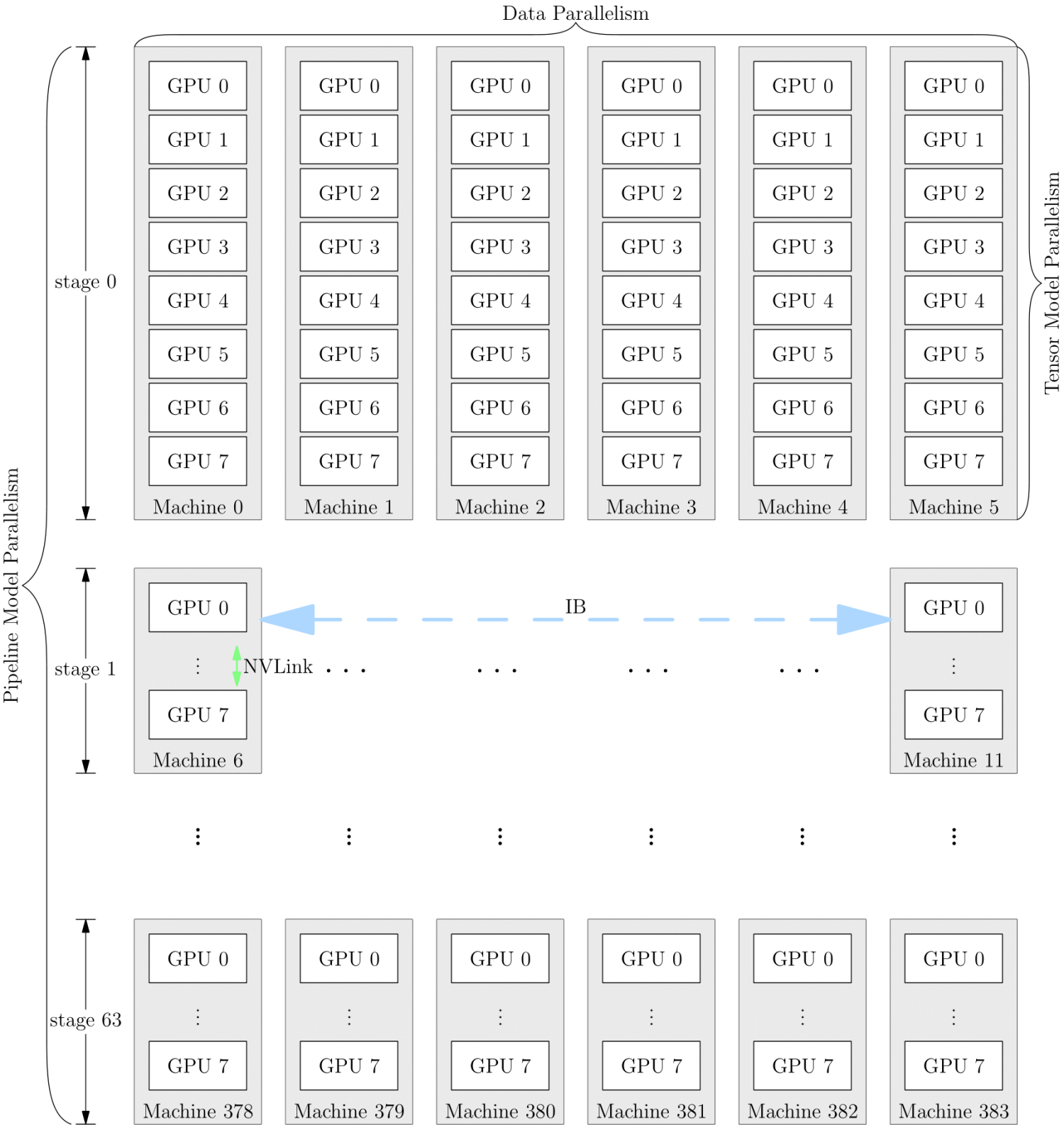
网络的训练中,也可以将多种并行策略混用,以 GPT-3 为例,以下是它训练时的设备并行方案:
它首先被分为 64 个阶段,进行流水并行。每个阶段都运行在 6 台 DGX-A100 主机上。在6台主机之间,进行的是数据并行训练;每台主机有 8 张 GPU 显卡,同一台机器上的8张 GPU 显卡之间是进行模型并行训练。
策略选择篇
单GPU
- 显存够用: 直接用
- 显存不够:上offload,用cpu
单节点多卡
- 显存够用(模型能装进单卡):DDP或ZeRO
- 显存不够:TP或者ZeRO或者PP
- 重点:没有NVLINK或者NVSwitch,也就是穷人模式,要用PP
多节点多卡
- 如果节点间通信速度快(穷人的万兆网肯定不算)
- ZeRO或者3D并行,其中3D并行通信量少但是对模型改动大。
- 如果节点间通信慢,但显存又少。。。用 DP+PP+TP+ZeRO-1
常见的显存优化技术
文章源自@Vadim Irtlach大佬在kaggle的开源notebook
- 梯度累积(Gradient Accumulation)
- 冻结(Freezing)
- 自动混合精度(Automatic Mixed Precision)
- 8位优化器(8-bit Optimizers)
- 梯度检查点(Gradient Checkpointing)
- Parameter-Efficient Fine-Tuning(PEFT)
- Torch FSDP+CPU offload
这一节的内容整理自大佬总结的节省显存的技巧,除了买GPU外,可以利用这些技巧帮助节省显卡内存,方便训练更大的神经网络。
由于内容比较多,单独写成一个 blog 了,欢迎学习。
《Memory-Efficient 的 LLMs 的训练/微调/推理方法》